


PHOTOMOD DTM是高效、精確的DTM/DSM自動提取及便捷DTM/DSM編輯模塊。可全自動、高效率地基于各種低空無人機影像、航空攝影測量影像及衛(wèi)星影像的立體像對提取極高精度的DTM或DSM數(shù)據(jù);并可對生成的DTM或DSM數(shù)據(jù)在平面或立體模式下進行各種靈活的交互式編輯處理。
全 新的PHOTOMOD DTM模塊可以在城市或森林等復雜區(qū)域自動提取可媲美機載激光雷達點云精度的高密度數(shù)字地表點云數(shù)據(jù)。在重疊度高于80/80%的航空影像 中,PHOTOMOD DTM通過應用先進的智能多影像匹配和有效的數(shù)據(jù)濾波實現(xiàn)獲取最高精度和可靠性的DTM或DSM點云,該點云使得城市區(qū)域的狹窄街道都可以被探測出來。
特征功能
1. 由 航片(掃描框幅式、數(shù)碼框幅式、推掃式傳感器及無人機相機)和各類型具備立體像對的衛(wèi)片(Spot 1-5,F(xiàn)ORMOSAT 2,EROS A/B,Terra/ASTER,Resurs DK;GeoEye 1,WorldVie-1/2,IKONOS,QuickBird,OrbView1-3,ALOS (PRISM),Cartosat 1;IRS 1C/1D,IRS P5 (Cartosat 1),IRS P6 (Resourcesat 1)等)自動提取DTM或DSM
2. 用戶自定義區(qū)域生成一個無縫DTM或DSM,可以是任意亞區(qū)、多邊形區(qū)域或整個影像區(qū)域
3. 選擇當?shù)刈钸m影像進行智能多影像匹配
4. 利用基于要素及最小直角匹配技術生成高密度點云,從而以不同方式提取DTM和DSM
5. 為DTM和DSM的提取提供不同濾波方法以獲得最優(yōu)點云
6. 預先考慮標準成圖數(shù)據(jù)(斷裂線、2維和3維未包括區(qū)域、邊界線)
7. 通過有效的限定要素內插排除外露層(如:樹木、建筑)后生成DTM
8. 項目區(qū)域可能需要被分成單個的多邊形區(qū),為地形類型和覆蓋進行合適的參數(shù)設置
9. 通過傳感器噪聲的動態(tài)濾出優(yōu)化點提取
10. 通過實地參數(shù)設置的自動優(yōu)化在紋理粗糙的影像區(qū)域也可以實現(xiàn)點的規(guī)則分布
11. 通過合適的視差限度策略,在斷裂線附近實現(xiàn)高質地形表示。
12. 大量內部質量控制功能
13. 在線指示影像重采樣(無額外的處理步驟;無中間存儲,減少利用硬盤空間)
14. 支持多核構件實現(xiàn)高生產能力(并聯(lián)處理)
15. 整合DTM工具包為DTMs提供靈活的后續(xù)處理,功能包括合并、分割及嵌合DTMs
16. 通過濾波有效減小DTM數(shù)據(jù)量
17. 支 持的數(shù)字高程模型格式包括:TIN、DXF、DGN、Arc Generate、ascii 、ascii -A;Surfer ascii 、ArcInfo ascii 、GeoTIFF、USGS DEM,VectOr MTW、ascii 、CSV、ERDAS IMAGINE、PCIDSK、DTED……
19. 可便捷地編輯生成的數(shù)字高程模型,并且對數(shù)字高程模型的數(shù)據(jù)量大小沒有任何限制
20. 可以將數(shù)千幅正射影像或完整的測區(qū)航片/衛(wèi)片放在 DTM數(shù)據(jù)下作為底圖,通過提供高效率的顯示和檢查工具來保證DTM的質量
21. 可以同時對超過5000萬點的DTM數(shù)據(jù)進行高效處理,在64bit時數(shù)據(jù)更多。通過高效的層導向數(shù)據(jù)結構管理數(shù)據(jù)
22. 目 視數(shù)據(jù)檢查:顏色重迭――在柵格影像上疊加DTM數(shù)據(jù),例如(自動選擇最適立體象對的立體影像;PHOTOMOD DTM通過支持嵌塊-緩沖立體系統(tǒng)的立體硬件進行操作,如果不支持嵌塊-緩沖立體系統(tǒng),則自動轉換成立體照片;正射影像;數(shù)字地圖);柵格影像的實時亮度 和對比度調節(jié);聯(lián)機生成等高線;帶地理參考影像的3維拖放的顯示;山體陰影圖;Z-編碼圖;非分析區(qū)陰影化;自由的旋轉側視,以方便LIDAR數(shù)據(jù)的交互 式分類
23. 自動合理的校核:通過交叉口、Z值重復錯誤、在XY或Z的大距離進行線檢測,并均進行半自動修正;外露層高度檢測;領近點和同一點檢測;點云中空隙檢測
24. 自動數(shù)據(jù)修正:對LIDAR 或MATCH-T DSM的點云進行局部濾波,以消除明顯錯誤,并可把點分類成植被和建筑物;刪除領近線的點;數(shù)據(jù)縮減算法;刪除重復點
25. 數(shù)據(jù)編輯和量測:可在立體、正射和側視時編輯;選擇和快照模式的范圍廣;點、線編輯高效;點和線的立體鏡量測;交互式柵格量測;多邊形區(qū)域的多種編輯功能(分類、刪除、恒定高度的設定等)

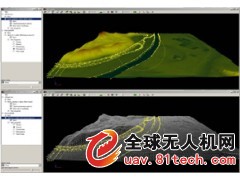
PHOTOMOD軟件自動DEM提取

城市高架橋DTM提取

全自動DTM提取
























 ?
?